Project Overview
In 2024, Designed and developed Robot 1 for the DD Robocon India competition, focusing on high-speed autonomous seedling/ball handling and precise actuation. The robot featured a three-wheel holonomic drive system, allowing omnidirectional movement for fast navigation across the arena. To handle the seedlings/balls efficiently, the team designed custom grippers actuated via a piston control board, enabling reliable pick-and-place operations under competition conditions. The robot's workflow included automated ball detection, picking, and throwing, integrating sensor feedback with control logic to maximize accuracy and speed. An ODrive-controlled arm was used for storing collected balls, coordinating multiple actuators seamlessly.
The development process spanned from concept design and CAD modeling to iterative prototyping and embedded system integration. Implemented custom PCB-based actuator controllers, developed precise motion control algorithms for the holonomic drive, and optimized sensor fusion for automated ball detection. Extensive simulations and real-world testing were conducted to fine-tune gripper actuation, throw trajectory, and storage arm coordination. Also focused on modularity and maintenance, allowing rapid component replacement and field debugging during matches. Robot 1's combination of mechanical innovation, electronics design, and software automation contributed to its competitive edge, securing a top position in Stage 1 and demonstrating strong capabilities in autonomous task execution.
Project Gallery
Technical Specifications

Drive System:
Three-wheel holonomic omni
Omnidirectional mobility for rapid, precise navigation across the arena
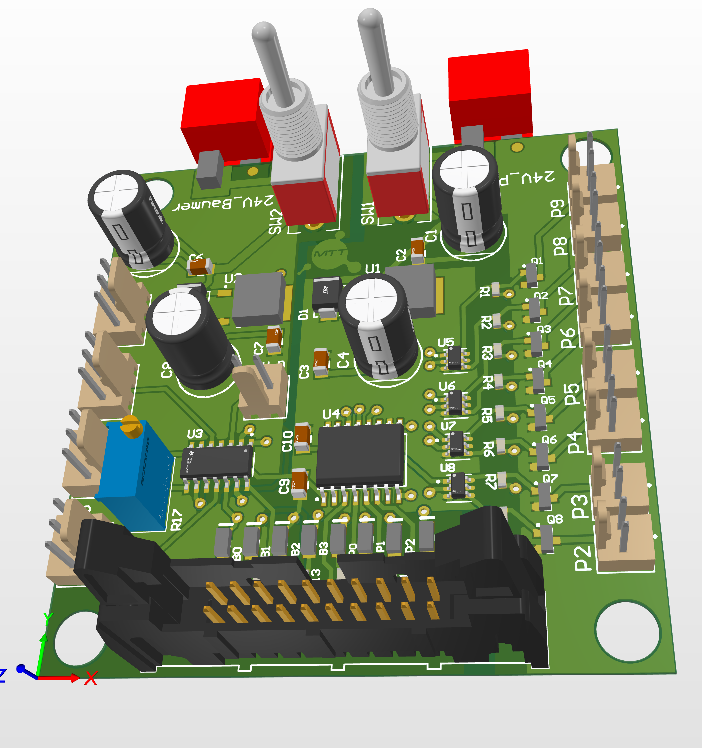
Actuation Board:
Custom piston board
Controls gripper actuation for automated pick-and-place of seedling

Feedback & Control
Baumer sensors, IMU & Encoders
Enables smooth automation of robot enabling the robot to work in cloosed loop.

Main Controller:
STM32F446RE
32-bit ARM Cortex-M4 microcontroller executing real-time calculations and PID loops for coordination of sensors, grippers, and throwing mechanism

Other Controllers:
ESP32 & TM4C
ESP Provides Bluetooth connectivity to the remote controller, TM4C Manages omni-drive motors with encoder feedback