Project Overview
The Single Battery System was designed to power the entire robot from a compact and robust Li-Po source. The system uses a 24V, 8,000mAh, 10C battery pack and incorporates a Battery Management System (BMS) for safe operation and monitoring. Power distribution is split across two batteries: one dedicated to the motors and the other supplying the rest of the robot. The secondary battery is further divided via DC-DC converters into multiple rails — 12V digital, 12V analog, 18V sensors, and 24V pistons — with signal isolators at each rail to prevent ground loops and ensure clean, stable power delivery. Fuse protection and LED indicators provide basic safety and visual status monitoring.
The system was designed for robustness, modularity, and reliability under dynamic robotic conditions. It has been tested under full load, demonstrating stable operation across all subsystems, including motors, electronics, sensors, and pneumatic actuators. This architecture simplifies robot wiring, reduces potential points of failure, and ensures consistent power delivery for high-performance competition robots.
Project Gallery
Technical Specifications
Power Distribution::
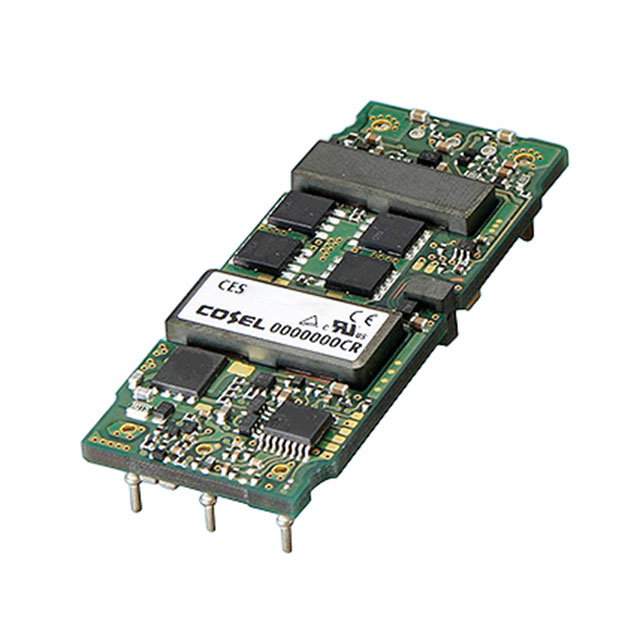
Isolated DC-DC
stable operation, clean voltage rails, and reliable performance

Isolated step down converter:
PTN
9-DOF IMU providing fused orientation data via UART for precise attitude measurement
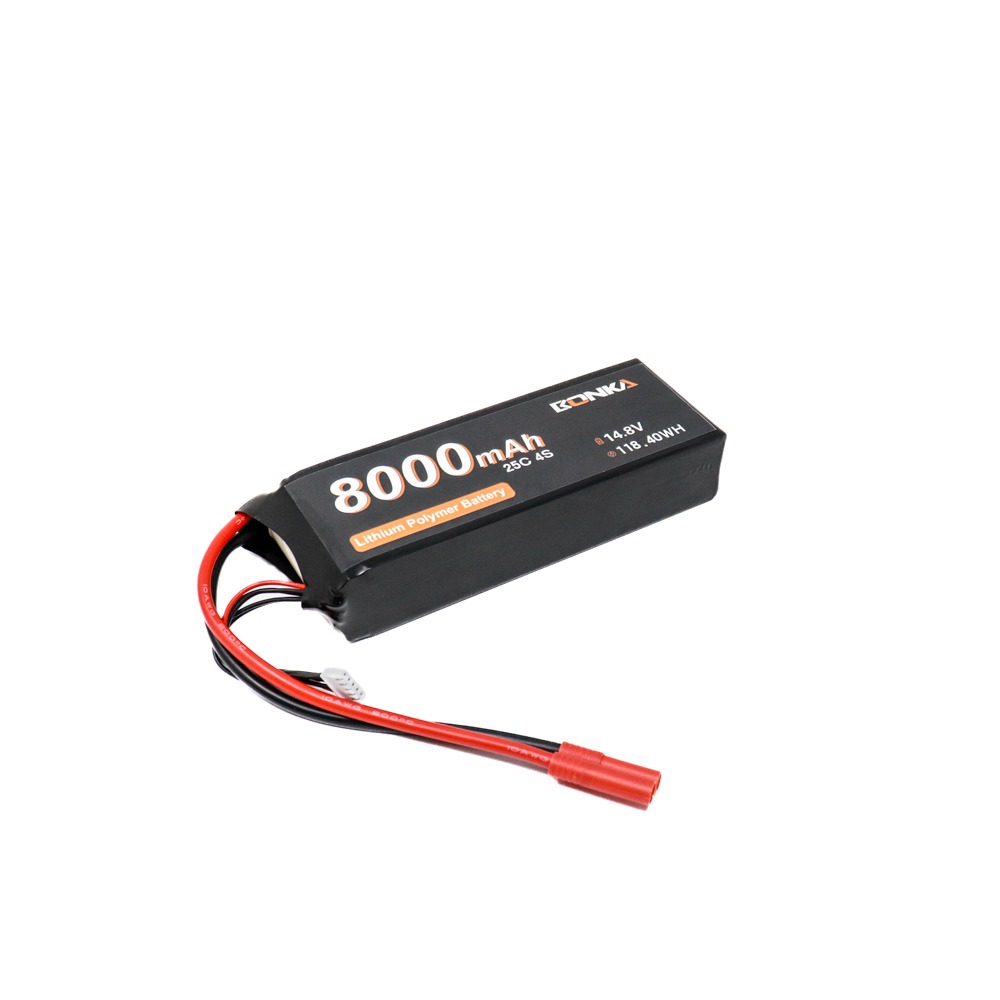
batteries:
24V 8,000mAh 10C Lipo
Battery 1 → motors; Battery 2 → rest of robot via DC-DC converters
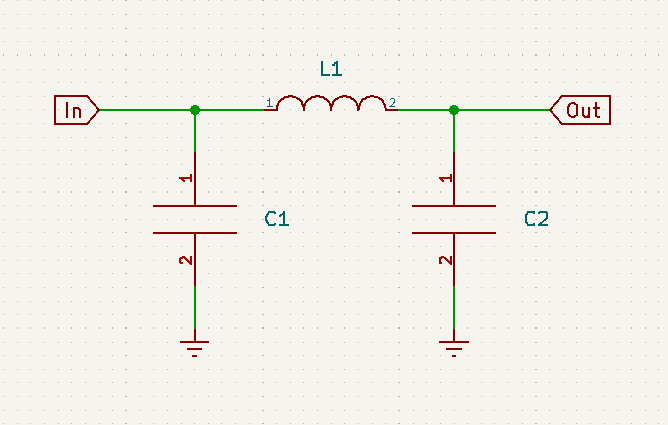
EMI Filters:
PI filters
Helps suppress the noise pressent in the DC power line