Project Overview
This project introduces a low-power PID-based control framework for fixed-wing UAV stabilization and trajectory correction. Instead of relying on thrust-vectoring or high-RPM motors, the system employs aerodynamic control surfaces (ailerons, elevator, rudder) actuated by servos, guided by real-time IMU feedback. Implemented on an STM32 microcontroller with a custom PCB shield, the design achieves energy-efficient orientation control using minimal sensors.
A key innovation lies in its bounded flap-angle correction strategy, which applies proportional surface deflections across error ranges, saturating only at extremes. This pragmatic approach ensures robust stabilization with low computational load, making it particularly suited for long-endurance, resource-constrained UAVs.
Originally built as a demonstration prototype, this work evolved into a research paper titled “IMU-Fused PID Control Framework for Autonomous UAV Stabilization and Trajectory Correction.”
Project Gallery
Technical Specifications
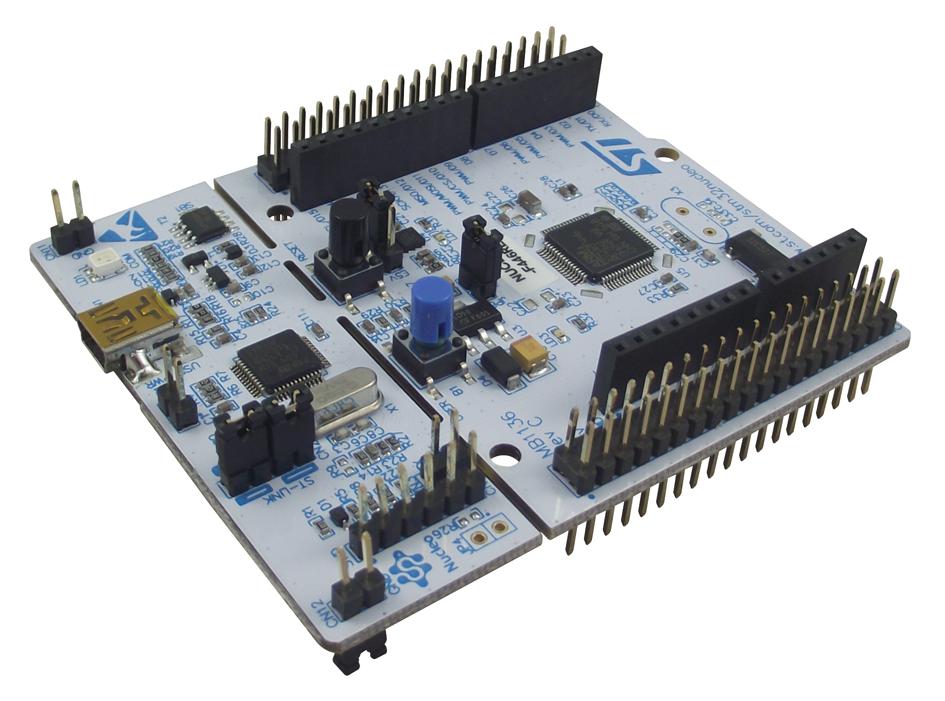
Core Controller:
STM32F446RE
32-bit ARM Cortex-M4 microcontroller running real-time PID loops for stable flight control

Sensor Suite:
ArduIMU v3
9-DOF IMU providing fused orientation data via UART for precise attitude measurement

Actuation:
Standard RC Servos
Controlling ailerons, elevator, and rudder for accurate maneuvering and stability
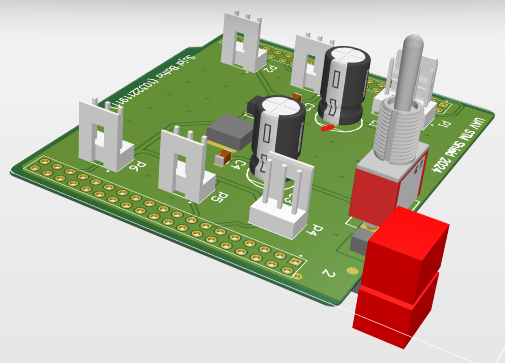
Custom Hardware:
In-house PCB Shield
Handles power regulation, IO hub functions, and noise-free routing for clean signal transmission

Firmware:
STM32CubeIDE
Modular firmware with dedicated PID loops for each axis, ensuring responsive flight control