Technical Report: UAV Stabilization and Trajectory Correction
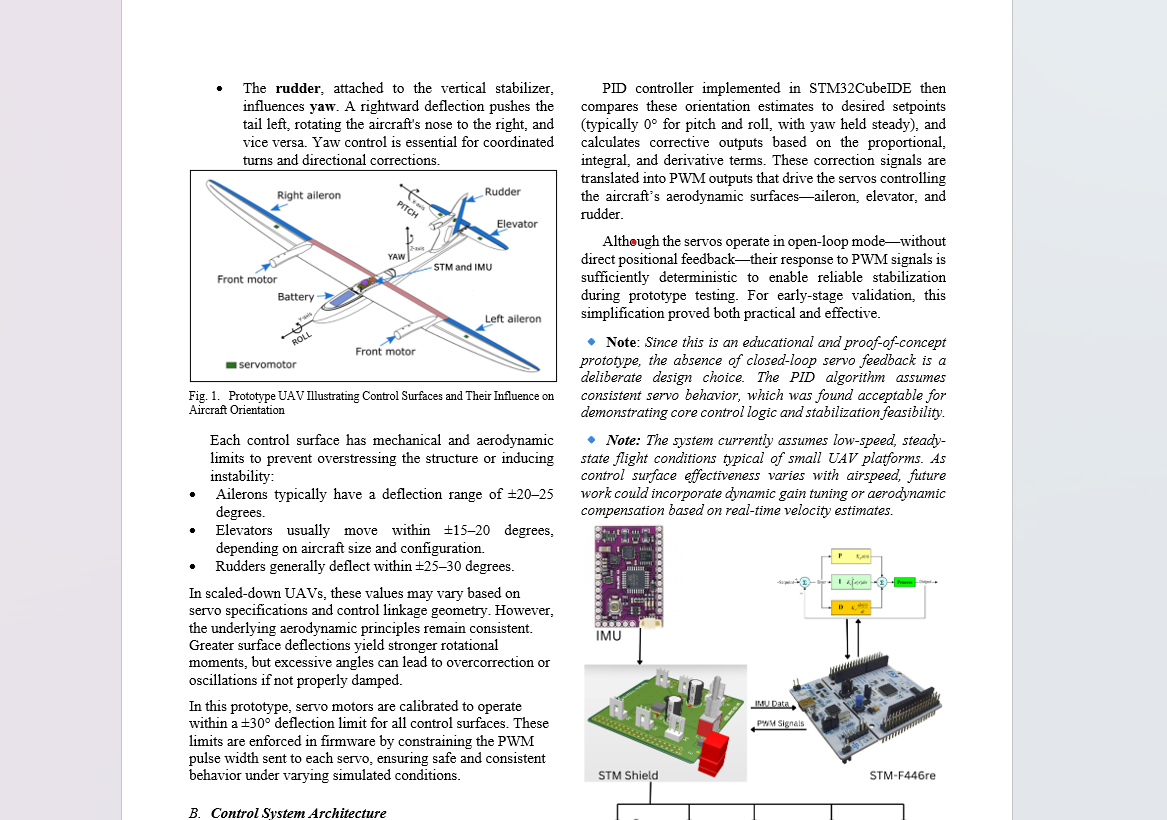
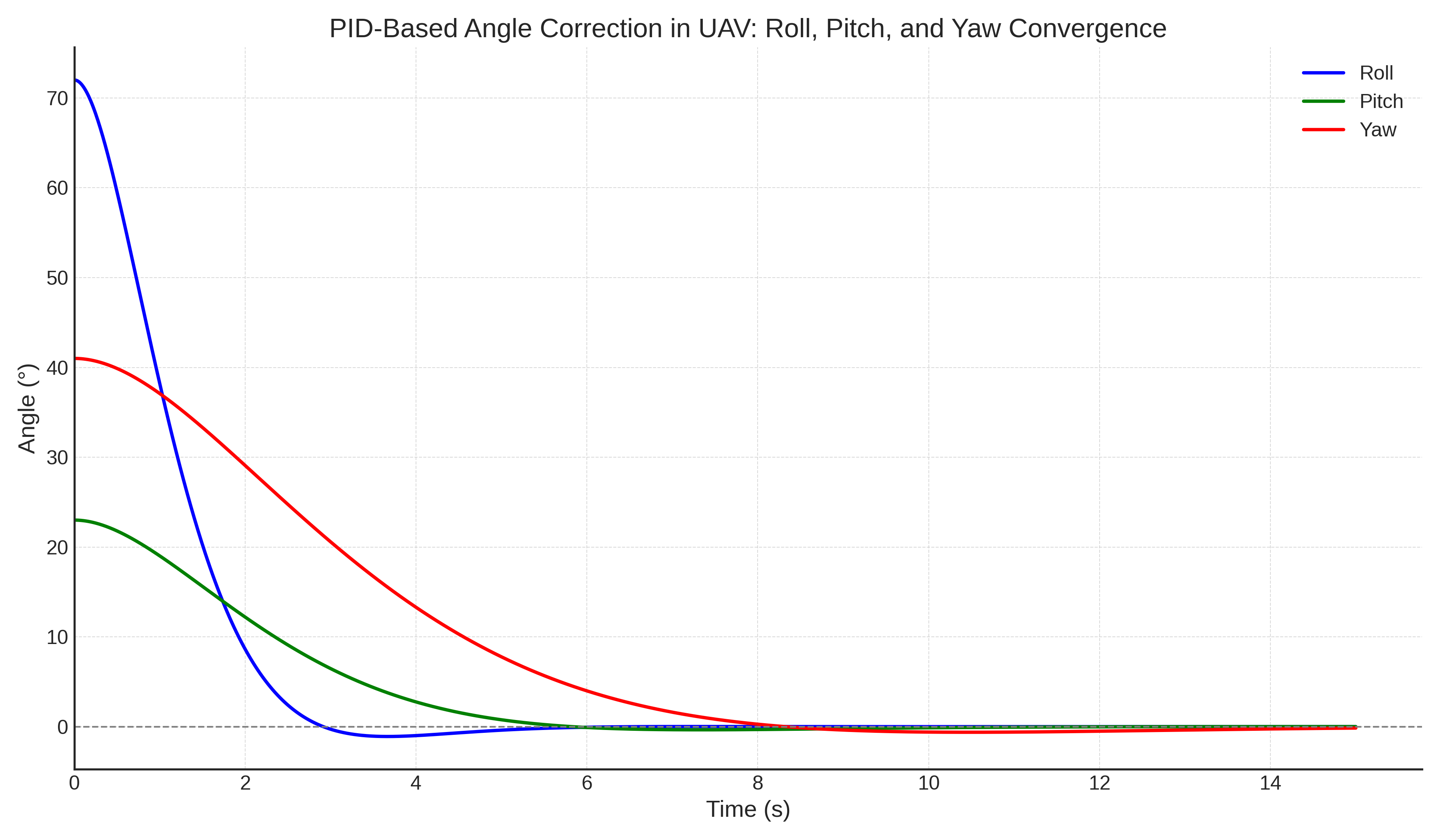
This technical report addresses the pervasive challenge of trajectory deviations and orientation instability in fixed-wing Unmanned Aerial Vehicles (UAVs) caused by dynamic environmental conditions. I developed and validated a novel Inertial Measurement Unit (IMU)-fused Proportional-Integral-Derivative (PID) control framework that utilizes aerodynamic control surfaces—ailerons, elevators, and rudder—to achieve real-time stabilization and autonomous trajectory correction. This methodology presents a low-power alternative to conventional thrust-vectoring techniques, which are often energy-intensive and less suitable for long-endurance missions.
The system was implemented on lightweight, embedded hardware, demonstrating a robust and responsive control mechanism with minimal sensor overhead. Experimental validation on a grounded UAV prototype confirmed the framework's efficacy in maintaining stable orientation under various dynamic perturbations.This work lays a critical foundation for the development of energy-efficient and scalable autonomous systems, with potential applications in sectors where flight duration and system simplicity are paramount.
YouTube Tutorial: Control Systems and Controller Architectures
This technical tutorial comprehensively analyzes open-loop and closed-loop control systems, addressing a fundamental challenge in robotics and automation. The video demystifies these concepts through definitions, comparisons, and real-world applications, explaining how these architectures form the backbone of modern automation. This resource provides a foundational understanding of control theory and common controller types, including PID controllers, helping students and engineers comprehend how robotic systems achieve precise behavior.
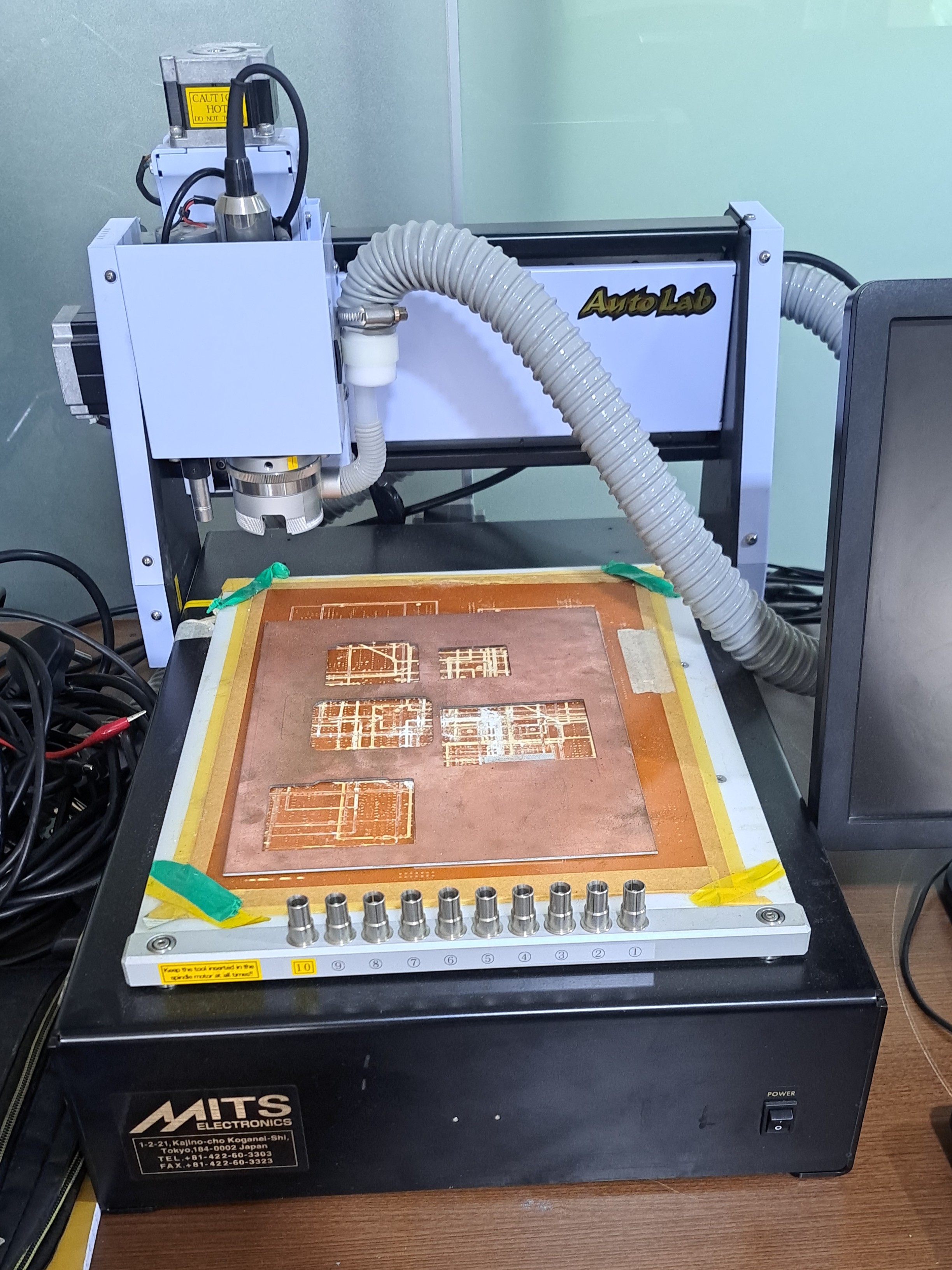
PCB Prototyping Machine: Setup and Technical Documentation
This project focused on the complex and undocumented process of setting up a MITS Solutions PCB milling machine, a crucial piece of equipment for rapid prototyping of custom printed circuit boards. The primary challenge involved reverse-engineering the machine's operation, parameters, and software interface to establish a reliable and reproducible workflow. This effort resulted in the creation of comprehensive, internal technical documentation detailing the full calibration and operational protocol, a resource that previously did not exist for this specific model.
As a direct outcome, this initiative enabled the university's electronics laboratory to fully integrate the machine into its academic curriculum and research activities. This work exemplifies a pioneering effort in laboratory infrastructure development, solving a significant technical hurdle and establishing a new standard for instructional and research-based prototyping.